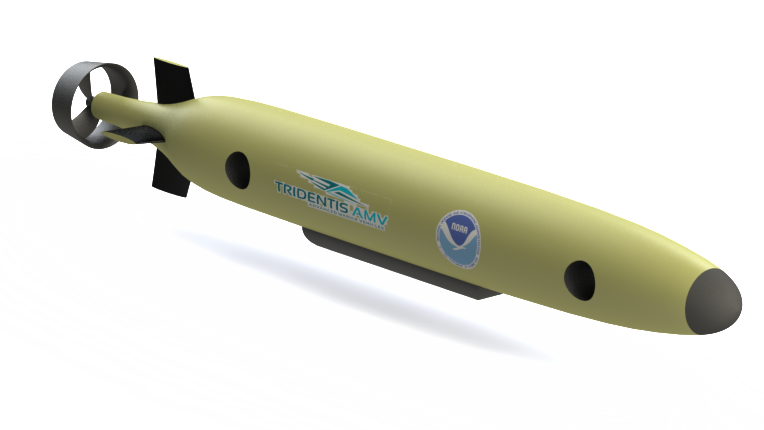
Advanced Marine Vehicles was awarded a Phase I SBIR for the design of a highly maneuverable Autonomous Underwater Vehicle (AUV) for NOAA. This AUV is called the Bottom Feeder because of its ability to not only operate at higher survey speeds, but also transition to a maneuverable Remotely Operated Vehicle (ROV) capable of operating near the bottom of the ocean. The Bottom Feeder is conceptualized as an AUV with alternate tethered capability for feeding bottom data to the surface. The submerged vehicle will be multifunctional, with initial primary functions of providing optical data and mapping coral reef ecosystems for depth range of zooxanthallate corals to mesophotic depths. The Bottom Feeder is able to maintain course and speed, provide position information, and maintain a set distance from the bottom. It is capable of horizontal and vertical operation, data transmission to the surface (via cable and wireless) and tethered operations when conditions warrant. It also has a robust collision avoidance system.
One of two primary systems on the autonomous vehicle is a device capable of measuring the visible portion of the electromagnetic spectrum (approx. 300-800 nm wavelengths) for current and future optical satellite-mounted sensors. To collect useful optics from the benthos, a sensor(s) will be used that measures irradiance (upward looking), standard optical calibration plate, and the bottom radiances (downward looking) and transmit those data to the surface.
The second system of the Bottom Feeder is focused on bottom mapping. This requirement for mapping originates from NOAA and several other agencies responsible for the monitoring the extent and health of U.S. coral reef holdings worldwide. Currently, the mapping and health assessment of coral reefs requires long-term investment of human resources and expensive survey systems with support subsystems. The Bottom Feeder would eliminate the need of human surveys, thus decreasing costs while reducing the risks associated with putting humans under water.
These two initial functions of the Bottom Feeder will directly provide data to NESDIS, NOS (National Ocean Service), NMFS (National Marine Fisheries Service) and Office of Oceanic and Atmospheric Research (OAR) as well as other State and Federal agencies, non-governmental organization (NGO), academic and commercial communities.
The third function of the Bottom Feeder is to map deep-water benthic habitats with design for an exchangeable set of sensors, such as sonar systems, etc. Additional sensors will be incorporated into the design interface for future applications for the Bottom Feeder. In addition to sensors, a sampler subsystem for water / sediment/ small materials will be designed into the Bottom Feeder. The Bottom Feeder further develops AMV’s tech pipeline and allows future growth opportunities.